
For this competition, we needed to design a robot that can pick up a dodgeball and shoot it in a hole 7 feet off the ground. Due to other complexities in the game, we decided that the robot, while holding the dodgeball, would have to be shorter than 18". Additionally, we only had access to a water jet and 3D printer for manufacturing so all designs were needed to facilitate these machines.
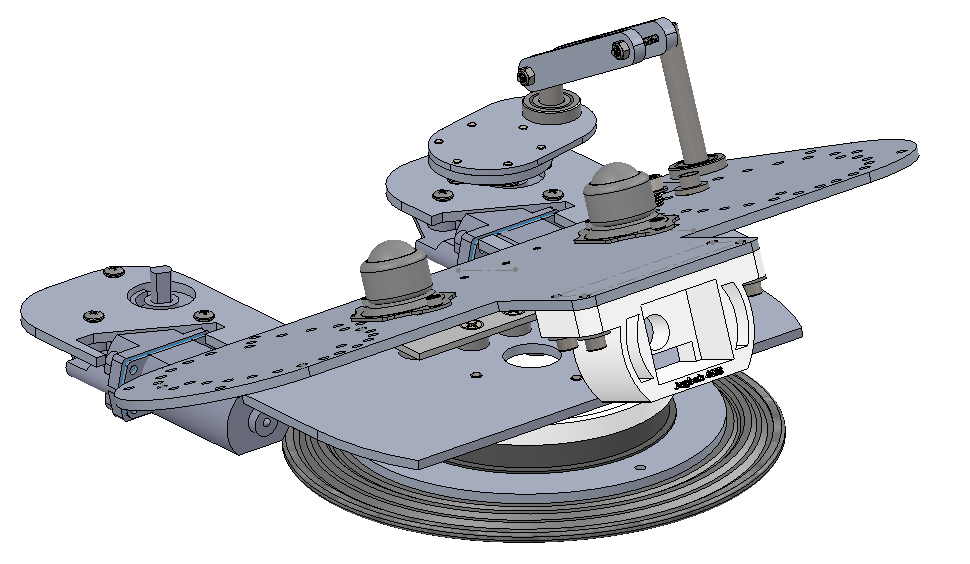
The design of this turret system remains one of my most fond memories. This turret was largely designed in a few hours by me and another member of my Highschool robotics teams. The turret allowed for rotation and inclination. It allowed for 19 degrees of inclination and 20 degrees of rotation while remaining extremely low profile. The entire assembly was on a turntable that was powered by a window motor via a belt and pulley. The inclination was controlled by a linkage arm mounted to another window motor.
This robot ended up being one of the most competitive robots in the are. It would be one of the few robots to consistently hit autonomous shots into the objective. This robot qualified and competed in the district championship and won an award for innovation in control.